 返回首页
返回首页 在线订单
在线订单 联系我们
联系我们

机械手实验--PLC可编程控制器
发布时间:2017-06-15 点击次数:次
一、实验目的
用PLC完成机械手传送工件的过程
二、实验器材
1、可编程控制器实验台1台
2、工件传送机构模块1块
3、PC机或FX-20P-E(自备)1台
4、自锁连接导线 若干
三、实验原理与实验步骤
1、工件传送机构演示板结构如图
2、用PLC完成机械手工件传送过程
3、控制要求:
(1)按下启动按钮,机械手下降到达限位开关S4时停止
(2)机械爪夹紧工件KM吸合,上升至限位开关S3停止
(3)机械臂右行至限位开关S2停止
(4)机械手开始下降至限位开关S4时停止
(5)机械爪松开KM失电
(6)机械手上升至限位开关S3左行,左行至限位开关S1停止
(7)回到初始位置开始下一个工件的传送
4、实验步骤:
(1)打开实验台电源,编程器与PLC连接
(2)根据具体情况编制输入程序,并检查是否正确
(3)按图接线,实验台与工件传送机构模块,检查连线是否正确
(4)启动程序,观察运行结果
四、设计程序清单
I/O地址分配
指令表:
梯形图
接线图:
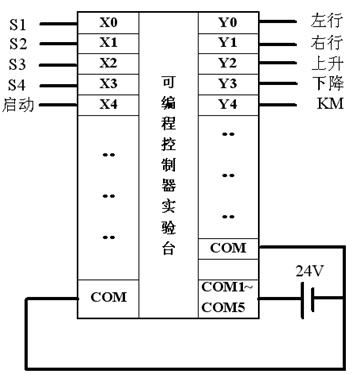
※FX系列的输出继电器的公共端:FX2N-32MR为COM0~COM4;FX2N-48MR为COM0~COM5;FX1N-60MR为COM0~COM7
用PLC完成机械手传送工件的过程
二、实验器材
1、可编程控制器实验台1台
2、工件传送机构模块1块
3、PC机或FX-20P-E(自备)1台
4、自锁连接导线 若干
三、实验原理与实验步骤
1、工件传送机构演示板结构如图
2、用PLC完成机械手工件传送过程
3、控制要求:
(1)按下启动按钮,机械手下降到达限位开关S4时停止
(2)机械爪夹紧工件KM吸合,上升至限位开关S3停止
(3)机械臂右行至限位开关S2停止
(4)机械手开始下降至限位开关S4时停止
(5)机械爪松开KM失电
(6)机械手上升至限位开关S3左行,左行至限位开关S1停止
(7)回到初始位置开始下一个工件的传送
4、实验步骤:
(1)打开实验台电源,编程器与PLC连接
(2)根据具体情况编制输入程序,并检查是否正确
(3)按图接线,实验台与工件传送机构模块,检查连线是否正确
(4)启动程序,观察运行结果
四、设计程序清单
I/O地址分配
| 输入地址 | 输出地址 | ||
| S1 | X0 | 左行 | Y0 |
| S2 | X1 | 右行 | Y1 |
| S3 | X2 | 上升 | Y2 |
| S4 | X3 | 下降 | Y3 |
| 启动 | X4 | KM | Y4 |
|
0 LD X004 1 ANI Y000 2 ANI Y001 3 ANI Y002 4 ANI Y003 5 ANI Y004 6 SET S1 8 STL S1 |
9 OUT Y003 10 LD X00311 SET S2 13 STL S2 14 SET Y004 15 OUT T1 K10 18 LD T1 19 OUT Y002 |
20 LD X002 21 AND T1 22 SET S3 24 STL S3 25 OUT Y001 26 LD X001 27 SET S4 29 STL S4 |
30 OUT Y003 31 LD X003 32 SET S5 34 STL S5 35 RST Y004 36 OUT T4 K30 39 LD T4 40 OUT Y002 |
41 LD X002 42 SET S6 44 STL S6 45 OUT Y000 46 LD X000 47 OUT S1 49 RET 50 END |
梯形图
接线图:
※FX系列的输出继电器的公共端:FX2N-32MR为COM0~COM4;FX2N-48MR为COM0~COM5;FX1N-60MR为COM0~COM7
